




Custom CNC Machining Parts for Humanoid Robot Joint Actuator – Rotary Flange & Bearing Support Ring
Description
Product Introduction
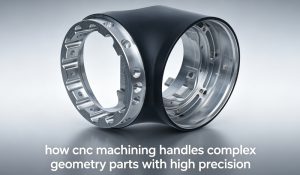
This humanoid robot joint structural component set consists of a high-precision output flange and a rotary support ring, engineered for advanced humanoid robotic actuator systems. The assembly is designed to deliver superior torque transmission, high load-bearing capacity, and exceptional rotational accuracy in multi-axis joint applications such as hip, knee, shoulder, and waist modules.
Manufactured using advanced 5-axis CNC machining technology, the components feature optimized lightweight pocket structures while maintaining high rigidity and structural stability. The hollow central design enables internal cable routing for motors, encoders, and sensors — a critical requirement in compact humanoid robot architectures.
The rotary support ring is engineered to withstand combined radial, axial, and moment loads, ensuring stable and precise joint movement under dynamic operating conditions. Tight tolerance control (concentricity ≤ 0.01 mm) guarantees smooth rotation and long-term reliability in high-performance robotic systems.
Material options such as 7075-T6 aluminum alloy or high-strength alloy steel provide an ideal balance between weight reduction and mechanical strength, meeting the stringent demands of next-generation humanoid robotics platforms similar to those developed by Tesla and Boston Dynamics.
This component set is ideal for OEM custom manufacturing, rapid prototyping, and low-to-medium volume production for humanoid robot developers and actuator module integrators worldwide.
Humanoid Robot Joint Output Flange
| Parameter | Specification |
|---|---|
| Product Name | Humanoid Robot Joint Output Flange |
| Application | Hip / Knee / Shoulder Joint Actuator |
| Material Options | Aluminum 7075-T6 / 6061-T6 / 40Cr |
| Manufacturing Process | 5-Axis CNC Milling |
| Surface Treatment | Anodizing / Hard Anodizing / Nickel Plating |
| Outer Diameter | 120–250 mm (Customizable) |
| Thickness | 10–35 mm |
| Central Bore | Hollow Design for Cable Routing |
| Mounting Holes | 6–12 Precision Bolt Holes |
| Concentricity | ≤ 0.01 mm |
| Flatness | ≤ 0.02 mm |
| Surface Roughness | Ra 0.8–1.6 μm |
| Weight Optimization | Lightweight Pocket Milling Structure |
| Production Type | OEM / Custom Machining |
| MOQ | 1 Piece (Prototype Available) |
Humanoid Robot Joint Rotary Support Ring
| Parameter | Specification |
|---|---|
| Product Name | Humanoid Robot Joint Rotary Support Ring |
| Application | Joint Load Bearing & Rotary Support |
| Material Options | 42CrMo / Bearing Steel / 7075-T6 |
| Manufacturing Process | CNC Turning + 5-Axis Milling |
| Structure Type | Inner & Outer Ring Assembly |
| Outer Diameter | 150–300 mm (Customizable) |
| Inner Diameter | According to Joint Design |
| Bolt Hole Type | Countersunk / Through Holes |
| Radial Runout | ≤ 0.01 mm |
| Axial Runout | ≤ 0.015 mm |
| Flatness | ≤ 0.02 mm |
| Heat Treatment | Quenching & Tempering (for Steel Versions) |
| Surface Treatment | Black Oxide / Nickel Plating / Anodizing |
| Load Type | Radial + Axial + Moment Load |
| Production Type | OEM / Custom Precision Machining |
| Quality Control | 100% CMM Inspection |
Additional information
| material |
|---|










Reviews
There are no reviews yet.