Description
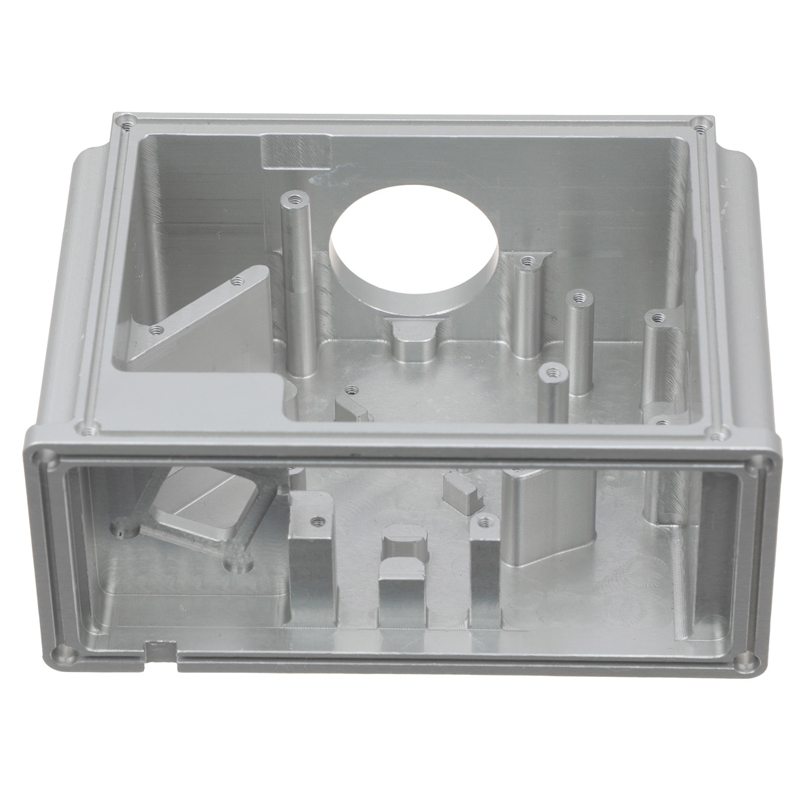
Our Industrial Robot EOAT Electric Gripper Drive Cavity Housing is a core structural component tailored for industrial robot end-of-arm tools (EOAT), specifically designed to support high-precision electric gripper systems. Crafted from
6061-T6 aluminum alloy (tensile strength ≥310 MPa), it balances robust mechanical performance with lightweight design (200g-600g), perfectly matching the mobility requirements of robot end effectors.
Using advanced CNC milling/turning processes, the housing achieves tight dimensional tolerance (±0.05mm standard) and interface coaxiality ≤0.01mm—ensuring precise alignment between the internal drive motor and external gripper execution components (critical for stable gripping/assembly operations). Its integrated side heat dissipation grilles (total area ≥150 cm²) effectively reduce internal component temperatures by 15-20℃, addressing the heat buildup of high-power electric gripper drives.
The housing features dual M45/M50 threaded interfaces (for connecting 2-finger/3-finger gripper arms) and M3/M4 motor mounting holes (compatible with 24V/48V electric gripper motors), plus auxiliary holes for integrating position/pressure sensors. With an IP54 protection rating and -40℃ to +85℃ operating range, it adapts to harsh industrial workshop environments. We offer full customization (dimensions, interfaces, grille design) per CAD drawings, and it is widely compatible with collaborative robots (UR3/UR5) and small industrial robots (ABB IRB 120, KUKA KR AGILUS).
| No. |
Parameter Category |
Parameter Description |
Remarks/Range |
| 1 |
Core Material |
Base Material Grade |
6061-T6 Aluminum Alloy |
|
|
Tensile Strength |
≥310 MPa |
|
|
Hardness (Brinell) |
≥95 HB |
|
|
Density |
2.7 g/cm³ |
| 2 |
Machining Precision |
Machining Process |
CNC Milling/Turning |
|
|
Dimension Tolerance |
±0.05mm (Standard), ±0.02mm (High Precision) |
|
|
Hole Position Tolerance |
±0.03mm |
|
|
Interface Coaxiality |
≤0.01mm (ensures alignment of drive motor & gripper components) |
|
|
Surface Roughness |
Ra ≤ 1.6 μm |
| 3 |
Structure & Dimensions |
Standard Dimension (L×W×H) |
100×80×60mm ~ 180×120×90mm (customizable) |
|
|
Wall Thickness |
2.5mm ~ 4.0mm (balances strength & EOAT lightweight requirement) |
|
|
Weight |
200g ~ 600g (calculated by dimension) |
| 4 |
Heat Dissipation Design |
Heat Dissipation Grille Size |
8×25mm (single grille), total heat dissipation area ≥150 cm² |
|
|
Heat Dissipation Efficiency |
Reduces internal component temperature by 15-20℃ (vs non-grilled housing) |
| 5 |
Interface Specifications |
Dual Front Thread Interface |
M45×1.0 / M50×1.5 (for connecting gripper execution components) |
|
|
Motor Mounting Hole Specification |
M3/M4 Threaded Holes (compatible with 24V/48V electric gripper motors) |
|
|
Auxiliary Component Mounting Holes |
M2.5/M3 (for position/pressure sensors) |
| 6 |
Protection & Environmental Adaptability |
Protection Class |
IP54 (resists industrial dust & splashing water) |
|
|
Operating Temperature Range |
-40℃ ~ +85℃ |
| 7 |
Surface Treatment |
Optional Processes |
Anodizing (Natural/Black), Sandblasting |
|
|
Coating Thickness |
8-15 μm (Anodizing, enhances corrosion resistance) |
| 8 |
Compatibility |
Applicable Electric Gripper Type |
2-Finger/3-Finger Industrial Electric Grippers |
|
|
Applicable Robot Model |
Collaborative Robots (UR3/UR5), Small Industrial Robots (ABB IRB 120, KUKA KR AGILUS) |
| 9 |
Customization Options |
Customizable Content |
Dimension, Interface Specification, Heat Dissipation Grille Design (per CAD drawing) |
|
|
Logo Engraving |
Laser Engraving |
| 10 |
Quality Standards |
Executive Standard |
ISO 9001, ASTM B209 |
|
|
Inspection Method |
CMM (Coaxiality/Hole Position Inspection), Hardness Test, Heat Dissipation Performance Test |









Reviews
There are no reviews yet.